+86-13858039910
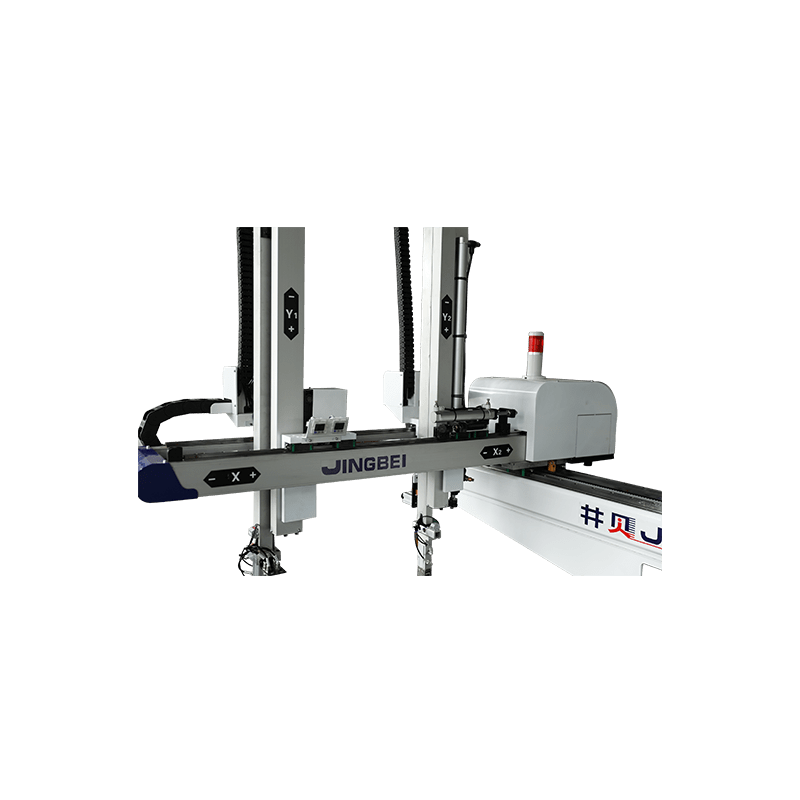
Muchos fabricantes de maquinaria y equipos ahora optan por utilizar brazos robóticos de moldeo por inyección como método de producción principal. El uso de brazos robóticos automatizados en la producción puede mejorar la eficiencia y la calidad de los productos y reducir los costos de producción. Sin embargo, si el brazo del robot de moldeo por inyección puede funcionar con precisión en la producción, en realidad es un problema de posicionamiento tridimensional. Es una combinación de varios posicionamientos lineales y angulares. Solo reduciendo los errores de estas combinaciones puede el manipulador de inyección funcionar normalmente. Entonces, ¿cuáles son los factores que afectan el error de posicionamiento de una sola línea o angular?
Métodos de posicionamiento y velocidades
Los diferentes métodos de posicionamiento tienen diferentes efectos. Por ejemplo, cuando se coloca la placa de garras mecánica, la precisión de posicionamiento está relacionada con la rigidez de la placa de garras y la velocidad cuando se toca la placa de garras. La velocidad de posicionamiento tiene una gran influencia en la precisión de posicionamiento, porque cuando la velocidad de posicionamiento es diferente, la energía consumida por las partes móviles es diferente. Generalmente, deberíamos controlar razonablemente la velocidad de posicionamiento para reducir el error de posicionamiento, como mejorar el rendimiento de almacenamiento en búfer y la eficiencia del dispositivo de almacenamiento en búfer y controlar el sistema de conducción para hacer que las partes móviles desaceleren a tiempo.
Precisión y rigidez
La precisión de fabricación y la precisión de regulación de la velocidad de instalación del manipulador tienen un impacto directo en la precisión de posicionamiento. Cuando la rigidez estructural y de contacto del propio manipulador es baja, la precisión de posicionamiento es generalmente baja debido a las vibraciones. La precisión del control de posición del control del interruptor, el control proporcional electrohidráulico y el servocontrol es diferente. No solo son diferentes la precisión y la sensibilidad de varios elementos de control, sino que también están relacionadas con el dispositivo de retroalimentación de posición.
Pesos y fuentes impulsoras de piezas móviles
Los pesos de las partes móviles incluyen los pesos del propio manipulador y el objeto que se agarra. Los cambios en el peso de las partes móviles tienen un mayor impacto en la precisión del posicionamiento. Generalmente, cuando aumenta el peso de las partes móviles, la precisión de posicionamiento disminuye. Por lo tanto, no solo se debe reducir el peso de las partes móviles en el proceso de diseño, sino que también se debe considerar la influencia de los cambios en el peso de agarre durante el trabajo. La fluctuación de presión de la presión hidráulica y de aire, la fluctuación de voltaje, la temperatura del aceite y la temperatura del aire afectarán la precisión de posicionamiento repetido del manipulador. Por lo tanto, se adoptan las medidas necesarias de estabilización de voltaje y ajuste de la temperatura del aceite, como el uso de acumuladores para estabilizar la presión del aceite, calentadores o enfriadores para controlar la temperatura del aceite, y usar válvulas de control para controlar la temperatura y el flujo de compensación de presión a bajas velocidades.